1
2
‘Mod Comments’ thread started with the most popular request.
First of all, in the competitive simulator realm, neither the official ‘Online PB's’ system nor ‘JaR’s hotlap system separates results based on road or race tyres usage; this will discourage players using genuine tyres from participating.
Now, LFS tyres imperfection is kinda opposite of ‘low grip’:
Combined with slicks' traction, inside front wheel is lifted off the track, which is ridiculous.
However, perceived lack of grip may not be caused by any flaws in the tyre model — watch her roll being ‘full send’: by Tiff Needell (from 07:10) and Naoki Hattori (from 15:40).
If the goal had been lap time, we might have said the suspension was too soft for its power; instead, comfort was a priority:
So, during acceleration rear wheels gain excessive camber (needed to compensate for significant roll) — the same kinematics that maintain contact patch during turns — weaken it on straight. There is anti-squat geometry to fix this, just currently not supported. And even if it were, torque would still be excessive: wheel spin when shifting into fourth gear (from 33:09).
The goal is not to make her the fastest or the most driver-friendly mod, just to reflect the inspiring idol.
First of all, in the competitive simulator realm, neither the official ‘Online PB's’ system nor ‘JaR’s hotlap system separates results based on road or race tyres usage; this will discourage players using genuine tyres from participating.
Now, LFS tyres imperfection is kinda opposite of ‘low grip’:
Combined with slicks' traction, inside front wheel is lifted off the track, which is ridiculous.
However, perceived lack of grip may not be caused by any flaws in the tyre model — watch her roll being ‘full send’: by Tiff Needell (from 07:10) and Naoki Hattori (from 15:40).
If the goal had been lap time, we might have said the suspension was too soft for its power; instead, comfort was a priority:
So, during acceleration rear wheels gain excessive camber (needed to compensate for significant roll) — the same kinematics that maintain contact patch during turns — weaken it on straight. There is anti-squat geometry to fix this, just currently not supported. And even if it were, torque would still be excessive: wheel spin when shifting into fourth gear (from 33:09).
The goal is not to make her the fastest or the most driver-friendly mod, just to reflect the inspiring idol.
URC1
Vehicle mod: URC1
Details page: https://www.lfs.net/files/vehmods/F1C575
SHORT DESCRIPTION:
COVER SCREENSHOT:

Details page: https://www.lfs.net/files/vehmods/F1C575
SHORT DESCRIPTION:
COVER SCREENSHOT:
Since D48, front tyre constantly squeaked at speeds above 27kph (17mph), even when riding in a straight line, which is quite annoying.
In reaction display mode, it is evident that the noise is somehow induced and increases proportionally with the significant lateral force on the front tyre.
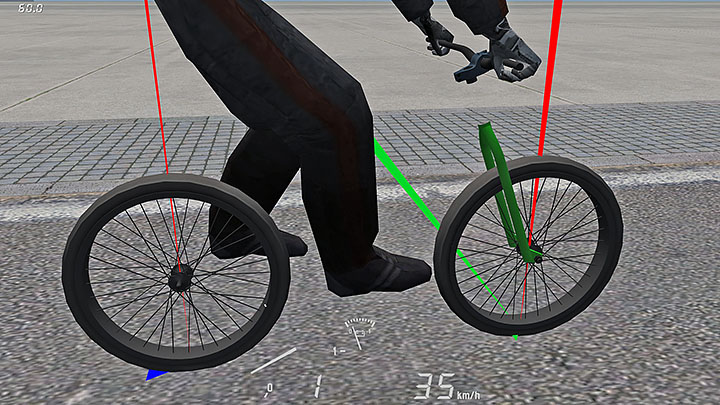
Obviously, the physics model is not intended to simulate rigid bikes. Perhaps it was just that before the introduction of balance-maintaining forces, this worked fine. So, I added a soft fork...

...and it turned out the rigid fork wasn't the issue.

Lateral force issue remain even when both axles are sprung. And there is another rigid bike mod, whose tyres do not squeak at any speed. So, it's not about suspension stiffness, how can this be fixed then?
There is another problem with this mod: fork elements misalignment during initial travel adjustment, which may be related to described above.
In reaction display mode, it is evident that the noise is somehow induced and increases proportionally with the significant lateral force on the front tyre.
Obviously, the physics model is not intended to simulate rigid bikes. Perhaps it was just that before the introduction of balance-maintaining forces, this worked fine. So, I added a soft fork...
...and it turned out the rigid fork wasn't the issue.
Lateral force issue remain even when both axles are sprung. And there is another rigid bike mod, whose tyres do not squeak at any speed. So, it's not about suspension stiffness, how can this be fixed then?
There is another problem with this mod: fork elements misalignment during initial travel adjustment, which may be related to described above.
The list of changes from D48 to D51 includes:
In my case the stanchions and the lowers coincided only at one and only one ‘lowest wheel height’ : -115mm, which makes the front too high and to get stance right must set front too soft. By the way, this height is exactly at the intersection of the head angle line and the vertical axle projection.
Oddly enough, that ‘lowest wheel height’ (-115mm) must be only in the first set. Proper value can be set in the second set without misalignment.
But! If you delete the first set, the second set (which allowed ‘lowest wheel height’ to be freely adjusted) will turn on and fork will immediately fall apart even if no settings are touched

All dimensions in LFS Editor are set correctly:
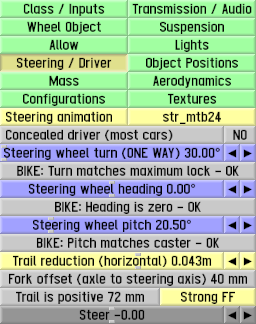
caster — 20.5°, horizontal trail reduction — 43mm, fork offset — 40mm, ground trail — 72mm, also axle coordinates -0.38 and +0.68.
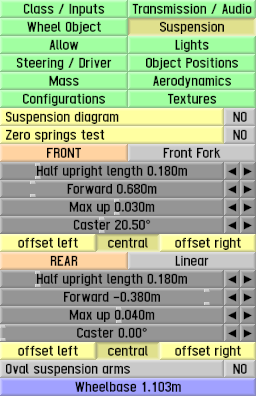
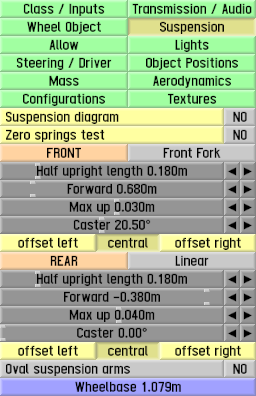
Two suspension tab screenshots with different wheelbase: 1.103m [soft] and 1.079m [normal].
In my case the stanchions and the lowers coincided only at one and only one ‘lowest wheel height’ : -115mm, which makes the front too high and to get stance right must set front too soft. By the way, this height is exactly at the intersection of the head angle line and the vertical axle projection.
Oddly enough, that ‘lowest wheel height’ (-115mm) must be only in the first set. Proper value can be set in the second set without misalignment.
But! If you delete the first set, the second set (which allowed ‘lowest wheel height’ to be freely adjusted) will turn on and fork will immediately fall apart even if no settings are touched
All dimensions in LFS Editor are set correctly:
caster — 20.5°, horizontal trail reduction — 43mm, fork offset — 40mm, ground trail — 72mm, also axle coordinates -0.38 and +0.68.
Two suspension tab screenshots with different wheelbase: 1.103m [soft] and 1.079m [normal].
Wheelbase and TrackAccording to blueprint shown by Thomas Freeman (on ‘Petersen Automotive Museum’ YouTube channel) wheelbase is 2342mm (20mm forward and 50mm backward relative to 1987 Yellowbird)
track width:
1432mm front and 1530mm rearPorsche Fahrer, issue 6-2020 specifies different:
1445mm front and 1500mm rearThere's more: in 2021 Max Beelaerts (on ‘AutoTopNL’ YouTube channel) mentioned three available body width options: ‘narrow’ body, ‘turbo’ body and 2.5cm on each side wider than ‘turbo’.
Regarding the chassis, I wonder how they planned to implement this: by moving pivots? various upright? spacers? wider wheels?
As for the body, it seems particularly expensive for a small batch — production costs already divided among just 50 cars and two extra widths means tripling price of molds and stuff.
So far, I haven't found any proof of a wide variant implementation. Rather,
there is footage from 2024 (on ‘TV22’ YouTube channel) showing an unpainted SCR body (naturally aspirated sibling that obviously doesn't have an intercooler) where you can clearly see the seam around where the air intake would be if it were CTR body.
Moreover, according to the Japanese importer website, CTR and SCR have the same width.
Yet to be defined by photo-referencing

I wonder if it will be the "old" 2D suspension too? (without anti-dive and anti-squat for mods)
2017 Yellowbird
2017 Yellowbird from Pfaffenhausen — spiritual successor of 1987 Yellowbird you might have seen on ‘Faszination auf dem Nürburgring’ driven by Stephan Rozer
Key features:
carbon monocoque
double wishbones around
silent blocks spherical bearings
964-alike carbon bodywork
993 windscreen and windows
997.1 ‘Mezger’ based engine
700hp/1200kg
Key features:
carbon monocoque
double wishbones around
silent blocks spherical bearings
964-alike carbon bodywork
993 windscreen and windows
997.1 ‘Mezger’ based engine
700hp/1200kg
Since you already made the front-engine 400Z, this time make a mid-engine car to diversify the class.
Artura is a hybrid so for now you can't really recreate it.
Artura is a hybrid so for now you can't really recreate it.
Aerodynamics > Lift (Downforce)
Here's the tricky part, if stated downforce (200lbs or 890N) is correct for top speed of a serial car 221 mph or 98.8m/s, then by quadratic function at 150mph or 67.1m/s it will be 93lbs or 411N, which is 58% of the Initial target.
 Perhaps downforce generated by fans reaches maximum already at 150 mph and does not increase further because their speed can be controlled by some program.
Perhaps downforce generated by fans reaches maximum already at 150 mph and does not increase further because their speed can be controlled by some program.Also print-out of tunnel 3/10 scale model run results is used as an illustration on Driving Ambition page 74, this one and above data summarized in table below.
Anyway, I see no reason to assign less downforce than planned, so 0.158 N @ m/s is chosen.
Aerodynamics > DragKnowing frontal area=1.79 m^2 and drag coefficient Cd=0.32 (ρ is air density) drag force can be calculated, so for V=67.1m/s (150mph) Fd=1580N.
To find body drag for LFS Editor divide drag force (1580N) by square of speed (V=67.1m/s)^2 = 0.351 N @ m/s.
But using this value LFS Estimated Maximum Speed Calculator (hereinafter — LFS.EMSC) indicates 373 km/h (232 mph), moreover acceleration from 255 to 350 takes 20 sec (16 sec IRL) and from 350 to 370 takes 20 sec again (8 sec IRL).
To match LFS.EMSC and Ehra-Lessien 391 km/h (243 mph) XP5 (experimental prototype number five) record run (not to be confused with official two-way average measured 386.7km/h or 240.3mph) body drag must be 0.304 N @ m/s.
Apart from fact that accelerating from 360 to 370km/h and from 370 to 380km/h takes one sec longer than IRL, even across Layout Square is not enough to reach 390km/h.
So 0.293 N @ m/s (LFS.EMSC 396 km/h) chosen because this body drag ensures acceleration coincides across all control ranges with deviation of less than a second.
Version 3 Aerodynamic changesreduced Body lift from –0.450 to –0.158 N @ 1 m/s
increased Body drag from 0.270 to 0.293 N @ 1 m/s
reduced Side drag from 0.600 to 0.586 N @ 1 m/s
Other changes in addition to those listed heregear ratios according to Autocar magazine: second from 2.21 to 2.19 and third from 1.68 to 1.71
final ratio from 2.99 to 3.03 to ensure maximum speed with
standard (7500rpm, 221mph, 356km/h)
"record" (8300rpm, 243mph, 391km/h)original starter sound from youtu.be/LSUvgTFp5Ts 0.740s (0.742s max)
original gear shift sound from youtu.be/KXihJTDSWb4 0.180s (0.184s max)
second (right) internal mirror disabled (not supported)
Thanks to Rony for helping me stop procrastination with improving the aerodynamics
Thanks to Martin because I had previously speculatively decided original tacho's four-digit readings must be too large to be readable on low resolution screen, but after he asked I tried and realized I was wrong.
Last edited by Egor K, .
Reason : "invisible" table reuploaded, listed additional changes
Approaching version 3.
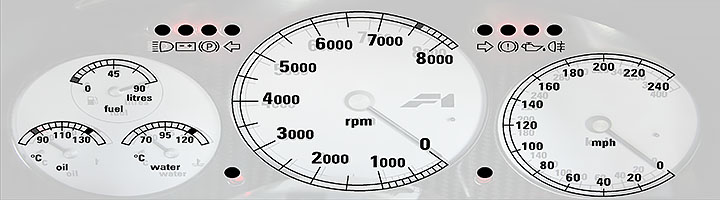
with shift light (just like IRL)
Analog speedo with dashboard backing texture can only be used with one speed measurement unit, decided to use mph: after all, it's a British car plus kph dial too small to read on a low resolution screen. But below analog dial is now preferred unit digital speedo.
plus kph dial too small to read on a low resolution screen. But below analog dial is now preferred unit digital speedo.
Still need to do metal pivots covers textures instead of black default ones, but I'll do that on texturing stage
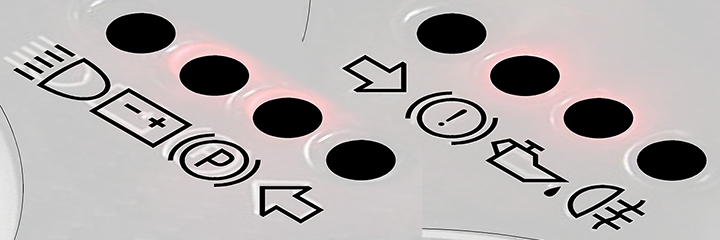
Also added rear fog light icon and now high beam icon works correctly
High beam
Passengers (leg intersection with floor beams is known)

However, the most important about new version is improved aerodynamics! Research almost done and I'll post it soon.
Improved lod3
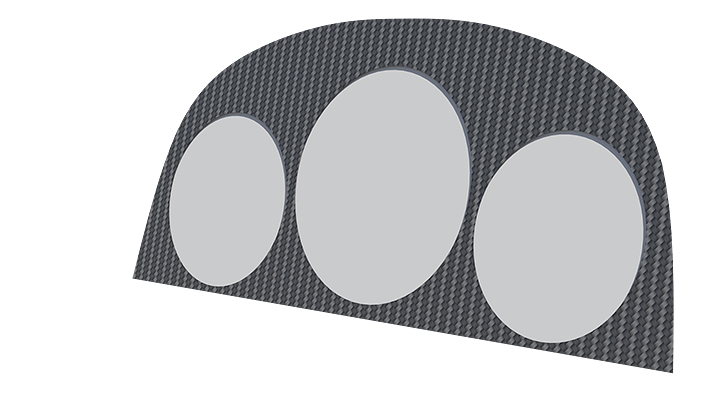
0.7E patch changes: dashboard, lights, passengersRealistic dashboard.
with shift light (just like IRL)
Analog speedo with dashboard backing texture can only be used with one speed measurement unit, decided to use mph: after all, it's a British car
plus kph dial too small to read on a low resolution screen. But below analog dial is now preferred unit digital speedo.Still need to do metal pivots covers textures instead of black default ones, but I'll do that on texturing stage
Also added rear fog light icon and now high beam icon works correctly
High beam
Passengers (leg intersection with floor beams is known)
Minor animation improvements
Improved interior shading
However, the most important about new version is improved aerodynamics! Research almost done and I'll post it soon.
Given the above, I assume a three-dimensional suspension is now a necessity.
Last edited by Egor K, .
Reason : minor abbreviation changes
I want the mod to be as accurate as possible.
 By the way, thanks to terga for link to the explanation:
By the way, thanks to terga for link to the explanation:Yes, but a lot of GTR's specs (such as CoG height, suspension motion range, roll centre and roll compensation, etc.) still to be found.
Also want make 'XP5' version as separate mod (raised redline, speed measuring equipment and fixed black color).
Official record is 386.7km/h, although XP5 (experimental prototype number five) for 22 seconds kept at least 390km/h: 2:42 — 390 km/h, 3:00 — "not going faster", 3:04 — descending.
External mirrorsmesh+SubD, optimized for LFS
Bumper air intakewith flow dividers and intercooler
Transition to mudguard
RimRim dimensions from alibaba.com. Hub dimensions from ZF Product Overview pdf (19.1 MB) (page 6/28).
Models for baking and for LFS tris limit:
Thank you guys for the kind words, although there are still textures and aerodynamics to be completed.
By the way, yesterday model was tested on Sim Racing Bible stream. Phil decided to repeat speed record, but did not reach 240 mph. Thing is for the speed record XP5 (experimental prototype number five) engine redline was raised to 8300 rpm, but URC1 has standard redline 7500 rpm.
For those who want to know more about record run there is "Racing Line" magazine article scans, though text hard to read, so you may use archived page with the same text.
, although there are still textures and aerodynamics to be completed.By the way, yesterday model was tested on Sim Racing Bible stream. Phil decided to repeat speed record, but did not reach 240 mph. Thing is for the speed record XP5 (experimental prototype number five) engine redline was raised to 8300 rpm, but URC1 has standard redline 7500 rpm.
For those who want to know more about record run there is "Racing Line" magazine article scans, though text hard to read, so you may use archived page with the same text.
Fog lights: reflector wireframe, material preview, rendered.
Diffuser textures baked using procedural normal map according to tutorial by pyrotechnick.
Bumper rough plastic texture according to tutorial by Golden Monarch.
Diffuser textures baked using procedural normal map according to tutorial by pyrotechnick.
Bumper rough plastic texture according to tutorial by Golden Monarch.

Exterior progress
I used cabin outline, bumper, headlights and mudguard position from Scania P 250 DB4x2MNA day cabin, not trying to 100% copy though.
Interior progressNo drawings used for interior, eyeballed only. As I said, it's worth the time matching Blender camera to LFS point of view.
For seat and steering wheel position I used drawing about ergonomics.
Steering wheelDuring modeling steering wheel form changed but at the beginning I used photo of Scania steering wheel from autoline-au.com.
Crane Truck
My mate converting an Iveco truck from box to platform with back mounted crane and since in unladen state rather large mass located at rearmost point it's intersting how it will behave at high speed (high for truck) so I want recreate it inside LFS.
 .
.
Plan is: place native mass objects, build frame with extra mass objects, make sure weight distribution corresponds to EUROCARGO ML180E25S specs, then add bed and crane.


then modeled frame and bed in CAD and calculated mass per metre to build frame in Vehicle Editor.
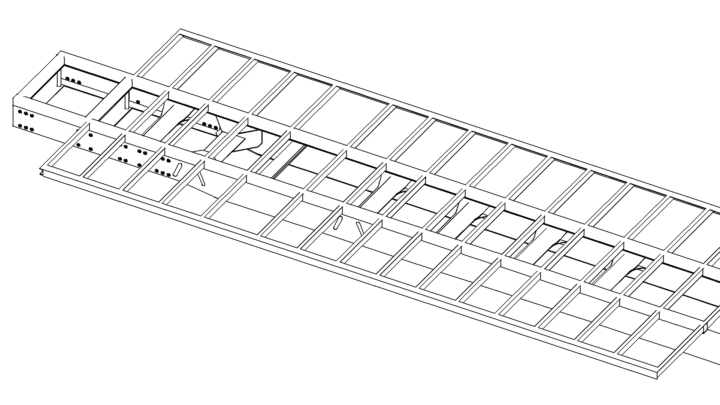
Truck frame (without bed and reinforcement for crane load) set to 1202kg.


Front axle of similar capacity mass (with oil and brakes) is 316kg. Front axle set to 283kg.
Rear axle if similar capacity mass is 645kg. Rear axle set to 600kg.

LFS Editor sets mass of four wheels to 176 kg. Conditionally divided mass into six wheels — two front, four rear — about 30kg each.
315/70R22.5 tyre mass is 59.70 kg. 315/60R22.5 tyre mass is 58.42 kg. 9.00x22.5 rim mass is 44.03kg. So one wheel mass is about 100kg, therefore added 406kg proportionally.
Same with spare wheel, but since frame tubes can only be added symmetrically, as well as spare tyre itself can be placed only in center, so additional 44kg is halved.

Wheels, spare wheel and battery additional mass is 500kg.
Cabin structure based on pic from Scania Truck Bodybuilder — Cab Structure (1038kg).

Truck chassis is 5315kg total. Compared to closest in mass Iveco chassis not more than 28kg discrepancy along the axes. It is acceptable.

Truck chassis with bed mass is 6034kg (bed 719kg).
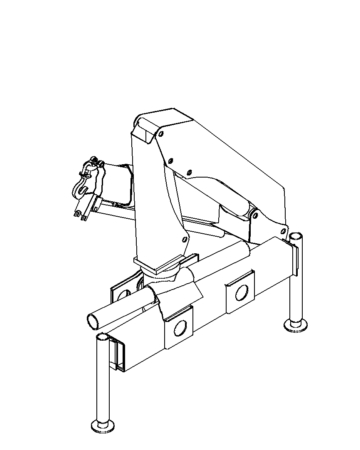
 Crane 1758kg
Crane 1758kg

I make cabin and dashboard in Blender as I like, not trying to copy any particular model, but I am inspired by various MAN and Scania trucks.
) so I want recreate it inside LFS.Mass / Object PositionsSome heavy parts mass cannot be set in mass menu, while some of these are unsprung, at least for now only way to set them — tubes, so they will be sprung
.Plan is: place native mass objects, build frame with extra mass objects, make sure weight distribution corresponds to EUROCARGO ML180E25S specs, then add bed and crane.
Mass > Frame (literally)First I went outside and take some measurements
then modeled frame and bed in CAD and calculated mass per metre to build frame in Vehicle Editor.
Truck frame (without bed and reinforcement for crane load) set to 1202kg.
Mass > EngineLFS Editor assigns mass of 5883cc engine 294kg. Cummins ISB 5.9L mass is 520kg. So added 226kg, then gearbox 350kg and radiator 99kg.
Mass > Suspension
Front axle of similar capacity mass (with oil and brakes) is 316kg. Front axle set to 283kg.
Rear axle if similar capacity mass is 645kg. Rear axle set to 600kg.
WheelsBy the way, factory truck had all wheels 315/70R22.5 and factory floor had continuous transverse beams that lay on longtitual beams of subframe. But bed must be low as possible to fit taller payloads and for that reason decided to T-weld transverse beams and to use rear tyres with lower profile: 315/60R22.5.
LFS Editor sets mass of four wheels to 176 kg. Conditionally divided mass into six wheels — two front, four rear — about 30kg each.
315/70R22.5 tyre mass is 59.70 kg. 315/60R22.5 tyre mass is 58.42 kg. 9.00x22.5 rim mass is 44.03kg. So one wheel mass is about 100kg, therefore added 406kg proportionally.
Same with spare wheel, but since frame tubes can only be added symmetrically, as well as spare tyre itself can be placed only in center, so additional 44kg is halved.
Mass > BatteryMass of one Promotive 680108100 — 45.1kg, truck has two. Native maximum 40 kg battery can be moved to the side, but additional 50kg is halved as well.
Wheels, spare wheel and battery additional mass is 500kg.
Cabin structure based on pic from Scania Truck Bodybuilder — Cab Structure (1038kg).
Truck chassis is 5315kg total. Compared to closest in mass Iveco chassis not more than 28kg discrepancy along the axes. It is acceptable.
- IRL — 3440kg (64.2%) front and 1920kg (35.8%) rear;
- LFS — 3423kg (64.4%) front and 1892kg (35.6%) rear,
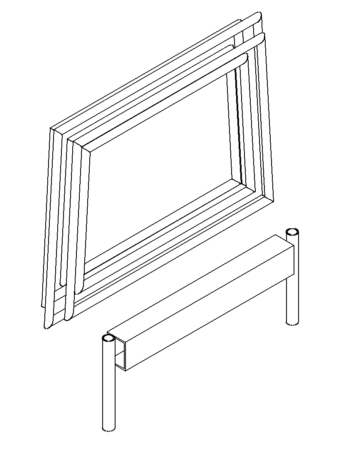
Mass > Bed
Truck chassis with bed mass is 6034kg (bed 719kg).
Mass > CraneI made crane with "LFS tubes" model in CAD to make sure COG matches, was only necessary to finish moving parts, cause I've already made model of fixed parts (using drawing from palfinger.com and self measurements) to calculate reinforcements of the frame tail, but that's another story.
EngineCummins 5.9L 24V (ISB).
Final driveGearbox ratios from ZF 6S800.
MeshCurrent exterior progress
I make cabin and dashboard in Blender as I like, not trying to copy any particular model, but I am inspired by various MAN and Scania trucks.
Last edited by Egor K, .
Steering wheel flange rendered using procedural carbon texture (here and below) according to tutorial by Chris Plush.
Closer view from opposite angle. Just to show details.

Icons drawn from scratch, for these I used photos from GTspirit article and photos by Alex Bellus as reference:
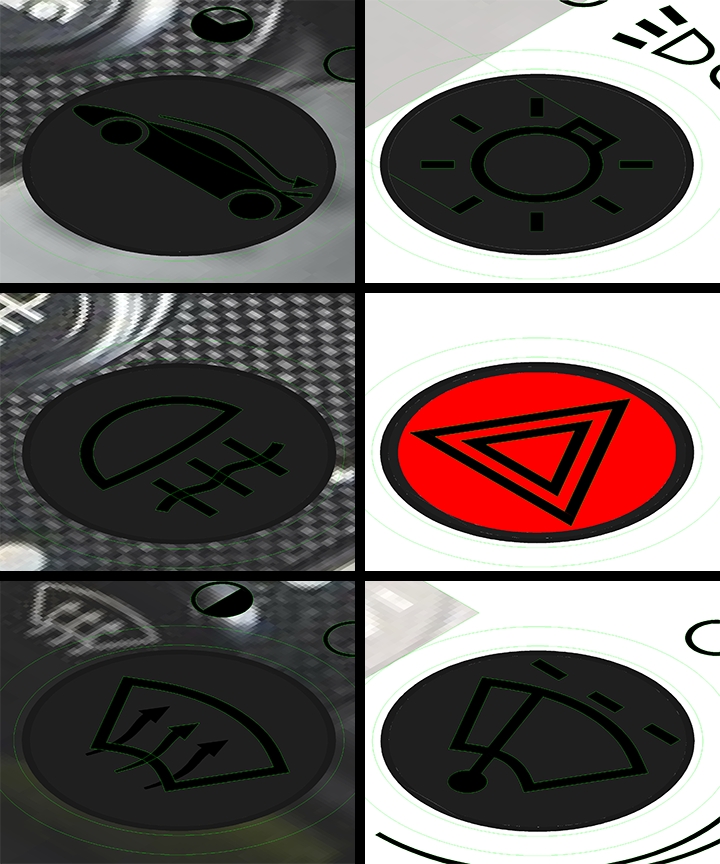
and for these I used photo (12/24) from roadandtrack.com:

Improved driver's seat using fSpy to match camera with the photo by Richard Owen (item 65/150):
Steering wheel flange rendered
Dashboard rendered
Closer view from opposite angle. Just to show details.
Icons drawn from scratch, for these I used photos from GTspirit article and photos by Alex Bellus as reference:
and for these I used photo (12/24) from roadandtrack.com:
Improved driver's seat using fSpy to match camera with the photo by Richard Owen (item 65/150):
Last edited by Egor K, .
Reason : added driver's seat
Approaching version 2. Today's post about exterior progress.
Tubes created by converting NURBS curves.
Object Data Properties > Geometry > Bevel > Round. "Depth" sets tube radius and "Resolution" sets transverse polycount.
Object Data Properties > Active Spline: "Order U" sets curve shape transition and "Resolution U" sets longitudinal polycount.
Diffuser textures baked using procedural normal map according to tutorial by pyrotechnick.
Parabolic focus-balanced reflector modeled using Extra Objects add-on: Add > Mesh > Math Function > Z Math Surface. I chose low-beam headlamp reflector focus=23mm Z Equantion: ( x**2 + y**2 )/(4*.023) and high-beam headlamp reflector focus=19mm. Formula from here. Sounds like overkill, but I only achieved nice reflection with parabolic reflector with focus on centre of bulb.

Headlight baked textures, improved front air intake shape, added wings and molding below. Textures baked in Blender according to tutorial by Gamedev Fred.


Taillight baked textures, engine bay vent grille baked textures, exhaust.

More streamlined external mirrors.

Brake calipers (different front and rear according to disc size).


Wiper subobject
Engine+exhaust subobject
Tubes created by converting NURBS curves.
Object Data Properties > Geometry > Bevel > Round. "Depth" sets tube radius and "Resolution" sets transverse polycount.
Object Data Properties > Active Spline: "Order U" sets curve shape transition and "Resolution U" sets longitudinal polycount.
Head- and taillightsModeled diffuser, bulb and parabolic parabolic focus-balanced reflector for baking lamp textures.
Diffuser textures baked using procedural normal map according to tutorial by pyrotechnick.
Parabolic focus-balanced reflector modeled using Extra Objects add-on: Add > Mesh > Math Function > Z Math Surface. I chose low-beam headlamp reflector focus=23mm Z Equantion: ( x**2 + y**2 )/(4*.023) and high-beam headlamp reflector focus=19mm. Formula from here. Sounds like overkill, but I only achieved nice reflection with parabolic reflector with focus on centre of bulb.
Headlights rendered
Headlight baked textures, improved front air intake shape, added wings and molding below. Textures baked in Blender according to tutorial by Gamedev Fred.
Taillight rendered
Taillight baked textures, engine bay vent grille baked textures, exhaust.
More streamlined external mirrors.
Brake calipers (different front and rear according to disc size).
This is shown in the third scheme — neither mesh nor mapping rotates towards "eyes" because mirrors median point and "eyes" are in center (X=0). I've tried manually rotating both mesh and mapping towards "eyes" to look backwards, but this doesn't change anything — in mirrors you see side windows.
1
2FGED GREDG RDFGDR GSFDG